Zusammenfassung der Ergebnisse einer interpretierenden Auswertung unserer bisherigen Auslegungen von Hans-Jürgen Unverferth (in memoriam Reinhard Sielemann)
In den letzten 4 Jahren sind nach Entwicklung der DSA- Technologie von uns 7 Generationen von Auslegungen realisiert und erprobt worden. Die Unterscheidungsmerkmale dabei waren:
1. – Position des WL auf dem DSA-Fuß
2. – Rohrdurchmesser
3. – Unterseitiger Öffnungsverlauf
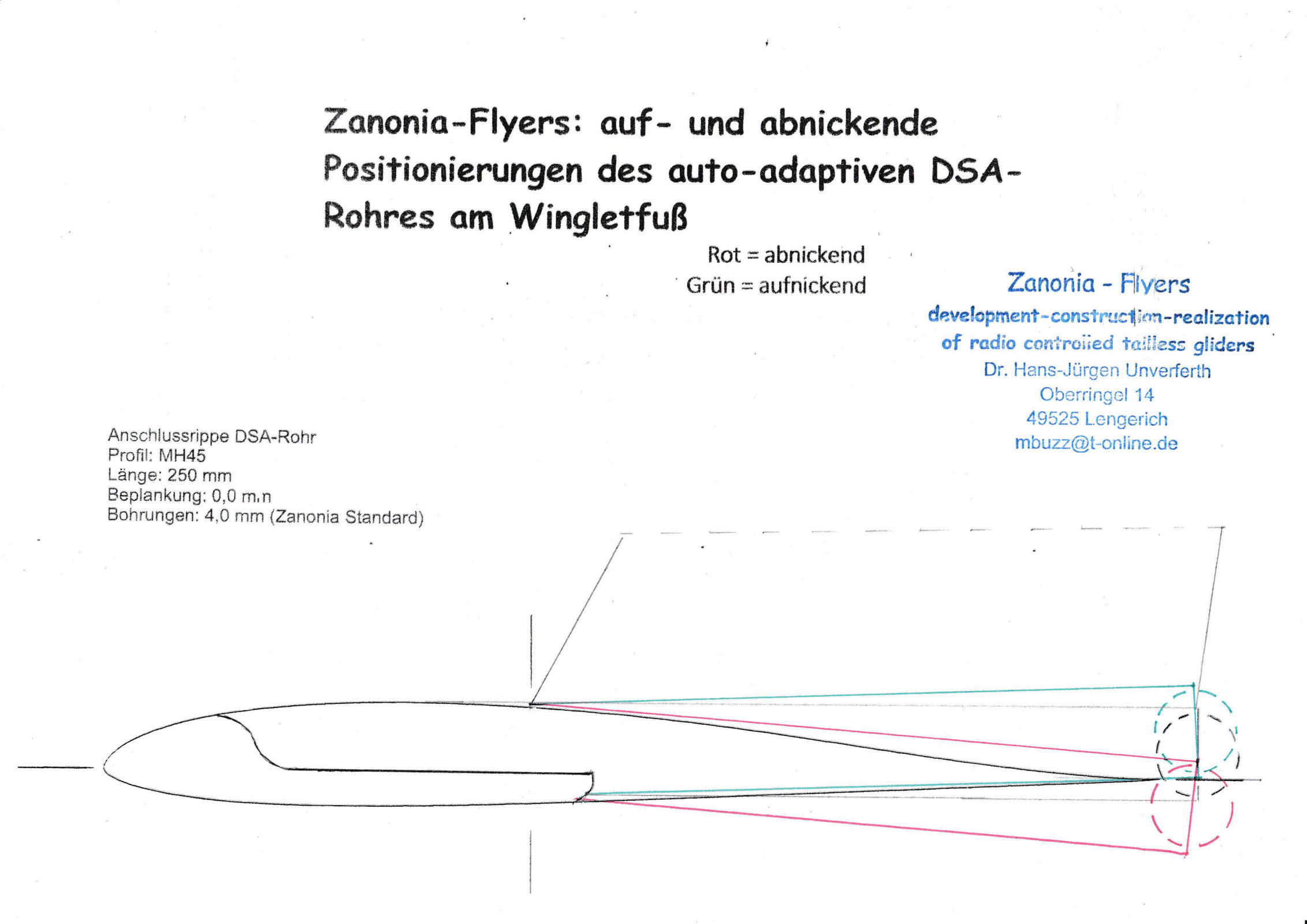
4. – Oberseitiger Öffnungsverlauf
5. – Einstellwinkel des Rohres gegenüber Profil-Nullsehne
6. – Profil des WL
In dieser Zusammenfassung geht es ausschließlich um Aspekte des 5. Punktes. Die Punkte 1-4 und 6 sind Gegenstände anderweitiger Betrachtungen.
Der Hauptwiderstand jeden Flügels wird als „induzierter Widerstand“ bezeichnet. Er entsteht durch den Ausgleich zwischen Unterseiten (Druck)- und Oberseiten (Sog)-Strömung am Flügelrandbogen (Wirbelschleppe) und nimmt mit Erhöhung des Anstellwinkels (Auftrieb) zu.
Aus der Tragflügeltheorie her ist bekannt, daß nur der unendliche Flügel keinerlei CWi mehr aufweisen würde. Da wir unsere Flügel meistens noch in unserer Lebensspanne fertigstellen und transportieren wollen, kommt diese Option für uns nicht in Frage. Also enden unsere Flächen irgendwo und weisen auch noch ein Winglet auf, welches Opfer einer garstigen Umströmung werden könnte, zusammen mit dem gesamten Außenflügel, der sich dort auch noch befindet (örtliche CA-Überlastungen lassen grüßen). Unsere DSA- Technologie stellt den Versuch dar, einen Teil des örtlichen Strömungsausgleiches in ein Rohr einzuleiten und somit widerstandsgünstiger (da VOR der Entstehung eines massiven Wirbelsystems) zum Flügelende hin abzuführen. Für die nächste Metapher bedienen wir uns der Physik: „Bremsen“ wird dort als „negative Beschleunigung“ definiert. „Lockern“ wir also die Bremse (induzierter Widerstand) an unserem Flügel, so können wir von „relativer positiver Beschleunigung“ reden: Prima! Nennen wir diesen Effekt doch einfach „Schub“. Und können wir die Richtung dieses Schubes vielleicht sogar beeinflussen?
Ja, das können wir, indem wir uns an der etwa aus dem E-Flug bekannten Technik der „Schub-Vektor-Steuerung“ orientieren! Und da sich unser Flügelende an einem Hebelarm gegenüber dem Drehpunkt des Gesamtflügels befindet vermag eine Schubrichtungs-Beeinflussung (in der Vertikalen) ein Auf-oder Abnick-Moment des Flügels zu verursachen.
Merke: Ein nach hinten/unten gerichtetes DSA-Rohr erzeugt ein Abnicken, umgekehrt ein Aufnicken des Gesamtflügels.
Wir entscheiden uns in der Auslegung unseres DSA-Winglets für die erste Variante, da wir von unserem DSA-Winglet gerade bei extern induzierten Anstellwinkelerhöhungen eine quasi „automatische Korrektur“ erwarten. Nur soll dieses Abnick-Moment natürlich nicht über den gesamten Anstellwinkel-Bereich des Flügels wirksam sein.
Und hier ist uns nun die „Selbst-Adaptivität“ unserer DSA-Technologie behilflich. Da unser „Schub-Effekt“ ja durch den induzierten Widerstand „befeuert“ wird, entsteht automatisch ein progressiver Zusammenhang zwischen CWi und „Schub“: gering / gering, hoch / hoch! (Ohne das Verständnis dieses Zusammenhangs leuchtet übrigens auch die negative Differenzierung unserer Querruderfunktion nicht ein)
Anmerkung: die zum Text gehörige Grafik stellt keinen Bauplan dar. Sie ist bewußt dimensionslos gehalten und dient nur der Erläuterung von Grundprinzipien.
Und übrigens: dieses ist NICHT der Versuch der Konstruktion eines
„Perpetuum mobile“!